
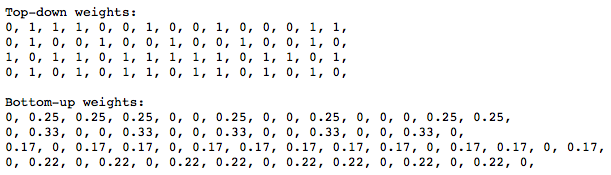
These screenshots show a visual representation of the output from a trained ART1 network.
Creating a functioning ART1 network is the first step towards implementing a suitable variation within my game environment, this will likely be a modified version of an ART2 network. The key difference between ART1 & ART2 is that ART1 only accepts a binary input, where ART2 functions with real numbers.
These initial test are based around a fixed set of binary input data:
The networks outputs match those ran at vigilance thresholds of 0.3 and 0.8 – with white nodes being inactive (0), red nodes being active (1) and their size is equal to their feedforward weighting.



 This version of the network already features some improvements over the standard model – primarily it features an extendable output node structure (recognition field). So the only two variables required for operation are the size of the test data arrays (number of binary digits – which is fixed thereafter), and the vigilance threshold value.
This version of the network already features some improvements over the standard model – primarily it features an extendable output node structure (recognition field). So the only two variables required for operation are the size of the test data arrays (number of binary digits – which is fixed thereafter), and the vigilance threshold value.
The recognition field is initialised with a single output node (neuron), and after this ’empty’ or ‘default’ node is trained with an exemplar pattern – a new output node is added to the field.
This limits the network by the increasing size of the recognition field and increasing time to resonate between it and the comparison field.
Currently the comparison (input) field is fixed after the network is initialised. As the size of this field is used within the feedforward weight scaling equation – it looks like this possible cannot change.
