
After a rather significant reworking the modified ART1 network now appears to function correctly – I call it ART2 but in reality this network is far closer to its binary cousin.
Importantly the test data used represents actual vector3 positions from within my test environment – 12 floats representing 4 vector3’s – the first two allocated for visual contacts, the second two for audio contacts.
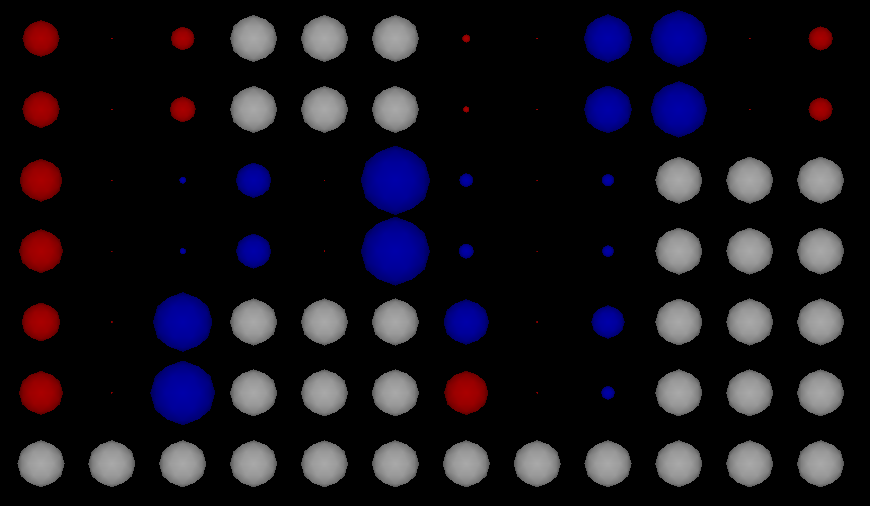
Vigilance Threshold = 0
As expected all six patterns are unique – even the first two pairs have slight differences (this was deliberate for the test data).
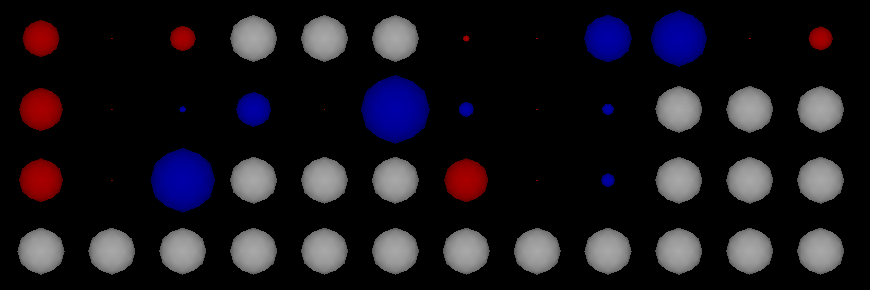
Vigilance Threshold = 1
The magnitude of the difference vector of the first two pairs was below 1 – these have now been accepted as members of that class and the initial node retrained (with the small differences its hard to see).

Vigilance Threshold = 28
It takes a rather high Vigilance of 28 for the final third pair to be considered a match (the x component of the second vector3’s sign was different). In practice a Vigilance this high would not be useful for my application.
The losses:
– The concept of using the dot product no longer works – vigilance is now measured by the magnitude of a difference vector between the input and the exemplar. Without the dot product this involves bypassing the normal ART architecture when a untrained or blank node is selected. In this implementation the difference vector is forced to 0’s (zero magnitude) to force a match.
– The feed-forward weight scaling equation has been altered to: value / ( 1 + the magnitude of the input vector ). This allows for negative scaling but this seems to still function correctly – same signs will result in a higher weighting, differing will lower it.
