
I have been working implementing a suitable search method for nearly two weeks at this point. After rewriting and improving some of the overall area detection code, the DBSCAN implementation almost looks complete.

Initially noise (yellow) nodes were being identified correctly, but clustering was definitely wrong. I have used colours here to attempt to debug the numerous clusters being generated (the actual number was often twice what the colours show).
After a fair amount of heading banging and rewriting this latest implementation appears to be giving pretty decent results, with one dodgy looking noise node to the top of the single cluster, and a rather distant looking cluster member to the bottom.

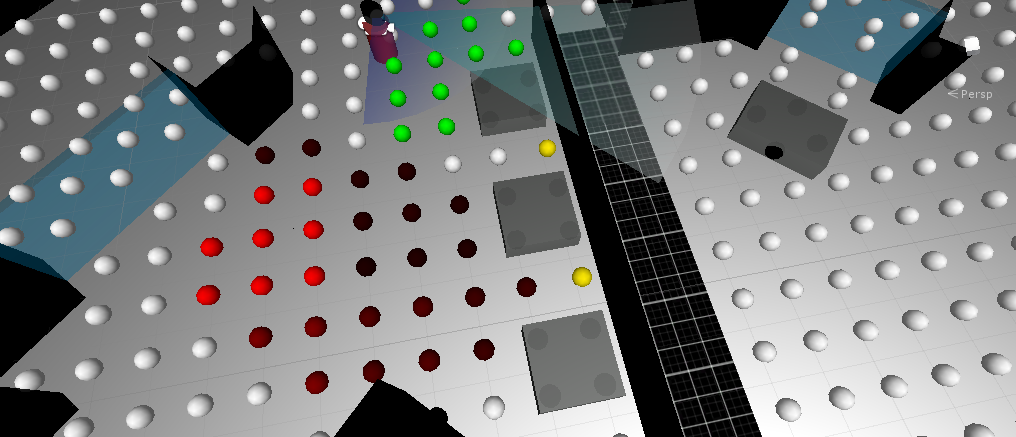
Here the algorithm has (mostly) correctly identified two main clusters, with another dodgy looking noise. Those two rogue nodes up top are still an issue.
